This post sponsored by Texas Instruments.
The term “real time” is bandied about quite a bit and not just in engineering circles. It is used as an advertising selling point for anything that means responsive. Real-time anti-lock braking, real-time stock quotes, real-time traffic, and weather in real time are all phrases that we hear often.
And despite its popular use, there really is no temporal standard or quanta of real time. The concept is always application-dependent. When considering “real time,” are we pondering a case that actually proves time is relative? Not necessarily. What we’re really proving is that the concept of real time actually denotes something that is “fast enough to handle the task at hand.”
For example, consider a factory that mixes chemicals in vats and heats them to a specific temperature. The majority of the automation technologies involved in running this factory include valves, level switches, power control (heaters and pumps), and temperature sensors. How can this factory – and the technologies used to run it – operate in real time?
The truth is: most engineers who are faced with a real-time design task must quantize their temporal resolution to determine what real-time means. And the mind’s eye is not a very good predictor, especially when prioritized interrupts and service routines must comingle. Inevitably, it takes some iterations of code to make sure that a timer service routine, for example, does not step on a data acquisition sample and conversion interval, all while preserving buffer integrity for communications.
Many micros are well-suited for real-time tasks with multiple timers and semi-autonomous peripherals that can operate concurrently with the processing flow. But, access to signals may be a problem during test and debug. Breakout boxes are great for allowing probing and monitoring of signals. Micro-pitch surface-mount devices are very hard to probe unless strategic test points are available. Not every point may be on a prototype since all pins are candidates for probing while debugging.
One example of a valuable solution is the PRU Cape add-on board, which brings out signals from the Texas Instruments™ Sitara™ family of processors (Figure 1). These include the AM335x and AM437x families, which feature a powerful Programmable Real-Time Unit (PRU) core functionality.
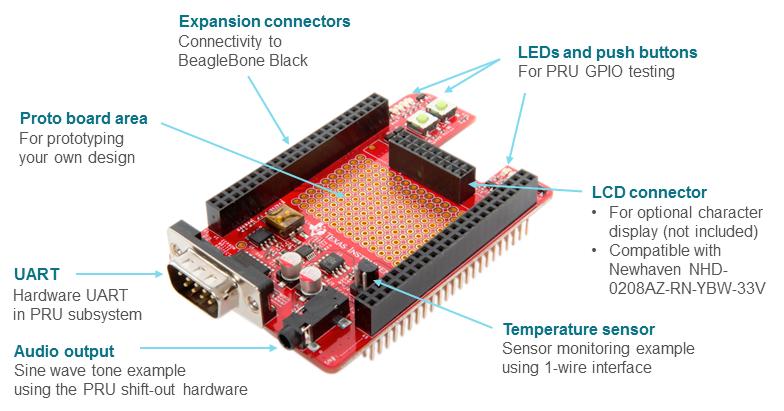
Figure 1: On-board status monitoring and user input can help test real-time service routines. All I/O is readily available for probing and interfacing. (Source: Texas Instruments)
The Sitara processors suitable for use with the PRU Cape are fairly high-end 32-bit RISC ARM-Cortex A8 and A9 processors running up to 1000 MHz, making them particularly well-suited for high-speed and real-time I/O. The PRU core is inside the Sitara processors as an independent low-latency microcontroller subsystem processor. As an add-on to the popular BeagleBone Black processor board, it is optimized for deterministic real-time processing with direct access to I/O.
Getting Started with the PRU Cape is relatively easy and a helpful reference design is available from Texas Instruments for real-time I/O-based operations. It includes status LEDS, pushbuttons, GPIO, and basic audio. A temperature sensor is included, as well as an optional display and prototype area. An on-board DB-9 based UART can serve as a debug monitor window into the processor. When designers are faced with the tasks of testing and debugging, they often find it helpful to have a clean and accessible breakout board, and the PRU Core does this very well.
PRU Cape
 To buy now at Mouser, click here.
To buy now at Mouser, click here.
TMDSEVM6678LE To buy now at Mouser, click here.
AM335x Starter Kit To buy now at Mouser, click here.
EVMK2H To buy now at Mouser, click here.
TMDSEVM6678L To buy now at Mouser, click here.
AM335x Industrial Development Kit To buy now at Mouser, click here.
TMDSDC3359 Data Concentrator Evaluation Module To buy now at Mouser, click here.
By: Jon Gabay, Hearst Business Media
Advertisement
Learn more about Texas Instruments




