Margaret Bishop, PHD
Technical Marketing Specialist, CAMI Research
www.camiresearch.com
When subjected to motion, cables experience fatigue, which causes complete or intermittent failures, even if that motion is not constant. Fortunately, there are cable and harness test systems that can easily identify and pinpoint the source of even the most elusive intermittent failure.
Necessary flexibility
Cables may flex intentionally as part of a pre-programmed robotic move, or unintentionally due to vibrations induced by operation or the environment. To ensure cable performance in such situations, specialized test systems are available.
The most flexible of these systems are backed by a large library of test boards that, for say robotics applications, includes compatibility with, for example, nano- and micro-D connectors. For optimal flexibility, usability, and fast reconfigurability — as well as economy — these boards are mounted with ‘families’ of connectors or connector slots (fig. 1 ). Such flexible cable and harness test systems may be used for all robotic applications, whether industrial, or service (e.g. personal, military, medical, logistic).

Fig. 1: Unlimited by connector type, connector adapter boards may be populated with groups of connectors, single connectors, or left bare for customization. Shown above are examples of configuration solutions for USB, D-Sub, nano-D, micro-D, Micro-D 100, IDC Wire-Mount Sockets, and more.
Pre-installation test
Faults such as bad crimps, broken wires, and cold solder joints will result in intermittent connections. The issue is whether test equipment is sufficiently sensitive to detect them, and whether the test is applied at the earliest possible point in the value-added stream — the earlier the testing, the less the impact of any detected error.
Those who buy connectorized cables for robotic applications will want to ensure their suppliers are shipping cables that have passed intermittent testing under fast cycle times. In this context, a full cycle comprises a complete sweep through all test points.
The intermittency tes t
The intermittency test is performed properly when the sample rate is high enough to statistically capture enough random events to raise the confidence level in the test result to an acceptably high degree. Companies running stringent quality programs (such as six sigma) will be looking for the fastest cycle time possible. They need testers that deliver diagnostic information above a simple pass/fail, so they can provide qualitative as well as quantitative data to their process-improvement feedback loop.
Note that although the intermittency test mode is often referred to as the ‘continuous test’, the test signal itself is always pulsed in order to sweep through the full set of test points. In this context, ‘continuous’ simply means that the test is continuously sweeping through these test points.
Testers are available that will sample 128 test points with 100-ms/cycle time using tester default settings, and as fast as 11 ms/cycle by reducing both dwell time (to zero) and the number of test points. Even faster speeds can be achieved by adjusting other parameters. These same testers include a dynamic GUI for identifying the type and location of the intermittent error (fig. 2 ), and can output ISO 9000-quality printed reports that include the same graphics.
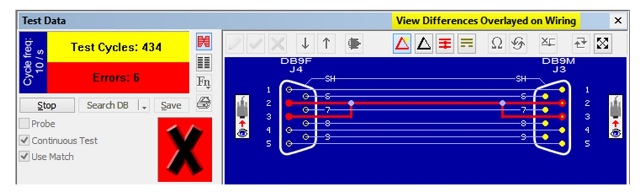
Fig. 2: Real-time intermittency testing identifies a) the number of passes and errors, b) the type of error (color-coded), c) the location of the error.
The probability of synchronizing a pulsed test signal with the instant of an error increases as the cycle speed is increased. Fig. 3 illustrates how a tester may deliver a false “pass” if its sample rate cannot be set high enough to capture the moment of error. Fig. 2 shows that in 434 attempts (that is, 434 full test cycles), six errors were captured at 100 ms/cycle while the cable under test was being flexed. If the sample speed had been set any slower, there is a high likelihood that the cable would have falsely passed the intermittent test.
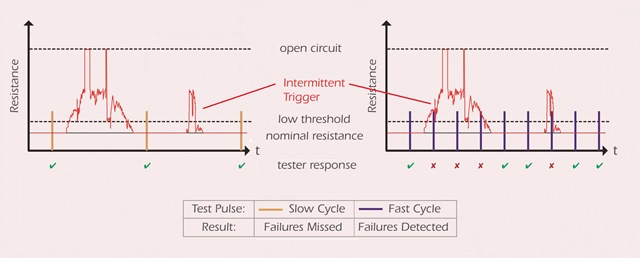
Fig. 3: The probability of synchronizing a pulsed test signal with the instant of an error increases as the cycle speed is increased.
Care must be taken when setting test parameters to avoid such false positives. The CableEye test system can perform 64-test-point intermittent testing at 11 ms/ cycle over any duration. Christopher E. Strangio, President of CAMI Research, which makes the CableEye tester, notes that not all intermittent tests are equal. “We have seen a side-by-side test where, under default settings, CableEye easily indicates intermittent errors in a fixture that has been ‘passed’ by another brand of tester.“ he says.
To achieve the necessary sample rates, resistance measurements are not part of the intermittent test, and only opens and shorts are reported. Ideally, an intermittent fault tester will permit testing at two thresholds in order to accommodate cables that have integrated resistive components. These types of cables may be tested in two stages. At the lower threshold, any line containing an integrated resistive component will deliver an “open” error. Testing again at a threshold set above the known resistance of the integrated component is necessary to isolate whether or not there is a true open fault on that line.
Post-installation
Cable diagnostics on failed, integrated, robotic systems can be approached in several ways. If removal of each cable in turn for testing is not feasible, testing may be performed in-situ using so-called “full” or “loop” test protocols. So that it can be brought to the test site, the tester itself may be on a mobile cart, rack-mounted with other diagnostic equipment, and operated with a touch screen laptop.
For full in-situ test, one disconnects each end and attaches adapters between each end of the cable and the tester. The intermittent test is then executed while the robot performs the motion that flexes the cable.
The in-situ loop test, on the other hand, is a two-step test that is often used when cables are very long, but may be applied to short cables in instances where the cable can neither be uninstalled nor is there room for fixtures at the ‘far' end. In step 1 of this test, with both ends disconnected, a shorts test is performed at one end. Continuity testing is carried out in step 2 after applying jumpers to pairs of pins at the ‘far’ end. At each step, after learning the cable set-up, an intermittent test will be carried out while the robot is performing the motion that flexes the cable. Using a tester’s macro feature, the entire loop test sequence can be readily automated, simplifying the diagnostic test for the operator.
For mission-critical robots in particular, the quality-control group will want to create a maintenance schedule that includes testing for intermittent errors. Testing over extended durations is also important for electrical life-testing of cables that undergo motion.
Advertisement
Learn more about CAMI Research




