From a Japanese space fighting force , to a laser cannon strapped to the ISS, many-a space programs have been proposed to deal with the issue of space debris, an issue that requires our immediate attention if we are to pursue any further space exploration. The latest contender — dubbed the CleanSpace One Project — is a cleanup satellite designed to gobble up debris like a giant, robotic space Pac-Man.
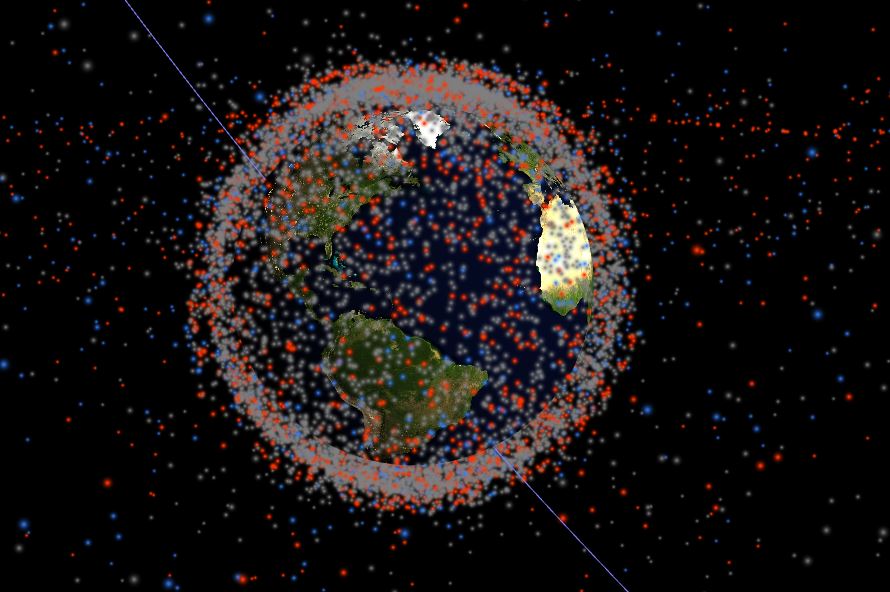
There are about a million chunks of space debris from discarded satellites and spent rockets currently encircling the earth in its low orbit, each a projectile traveling at 7 km/second; that’s fast enough to puncture the hull of a spacecraft caught in the crossfire. So dangerous are these objects, that NASA must monitor all debris larger than 10 cm. Other items, such as the SwissCube satellite, are too large to be left alone and must be retrieved or eliminated; this is where the CleanSpace One comes in.
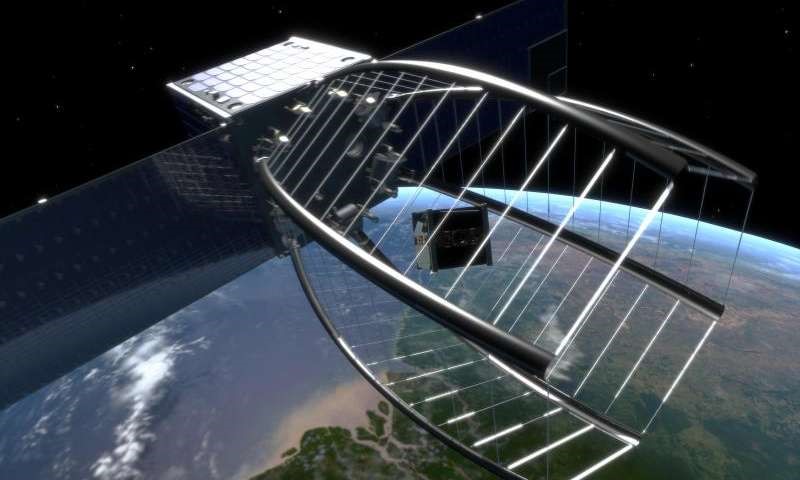
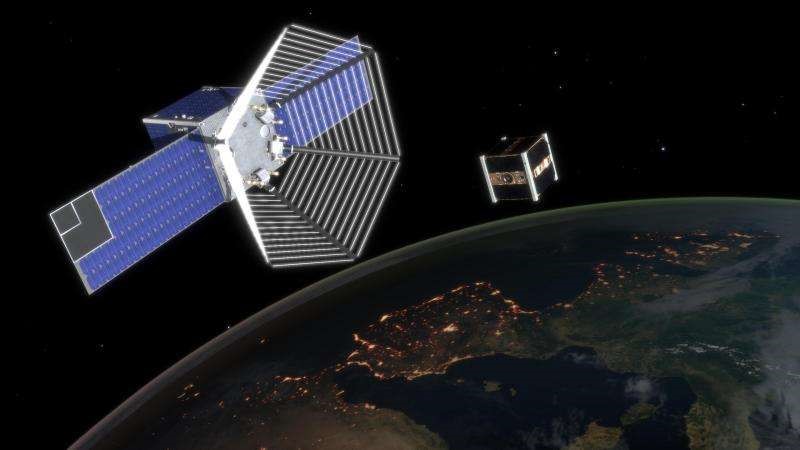
Developed over the course of three years by engineers from eSpace, EPFL’s Center for Space Engineering and Signal Processing 5 Laboratory (LTS 5), CSO will deployed on a mission to specifically recover the SwissCube satellite using a conical net that reaches forward and swoops up the device. Such a seemingly mundane task is no small feat; the SwissCube measures only 10 by 10 cm, is difficult to grasp, and reflects light differently from each side.
“These variations can perturb the visual approach system and thus also the estimates of its speed and distance.” Muriel Richard-Noca, head of the project, emphasizes the delicacy of the mission when speaking with Phys.org: “It only takes one error in the calculation of the approach for SwissCube to bounce off CleanSpace One and rocket out into space.”
To recompense its visual systems, the team is testing an advanced visual algorithm that takes into account a wide variety of parameters, including the angle of illumination from the Sun, the speed of its rotation, the relative speed at which it is moving in relation to the SwissCube, as well as the illumination of the Sun.
The actual capture mechanism was brainstormed by students from the University of Applied Science in Geneva (HES-SO HEPIA) who were inspired by iconic Pac-Man, from the classic arcade game by the same name; the prototype uses a net arranged in a cone that unfolds and closes around the SwissCube, raking it in like a giant octopus feeding itself. “This system is more reliable and offers a larger margin for maneuvering than a claw or an articulated hand,” says Michel Lauria, professor of industrial technology at HEPIA.
CSO has completed its prototype stage and is set to launch in 2018.
Source: Phys.org
Advertisement
Learn more about Electronic Products Magazine




