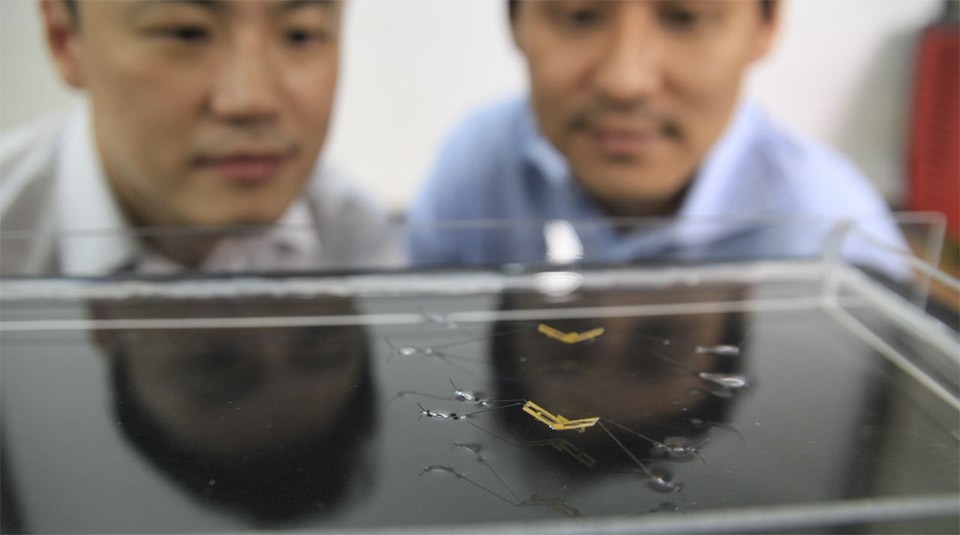
After years of closely studying the water strider’s ability to walk and leap off the surface of water, researchers from Seoul National University and Harvard’s Wyss Institute for Biologically Inspired Engineering have learned how to replicate the insects’ unique biological mechanism within artificial robots. Now, they’ve developed miniature robots capable of leveraging water’s surface tension to prance along its surface before generating enough upward thrust to leap forward.
From a biological perspective, the feat is entirely unique, reserved only for light-weight insects whose overall weight is below the opposing vertical force caused by the water’s surface tension and who exhibit particular hydrophobic qualities in their legs that repel water molecules and prevents them from getting wet. It’s a tricky mechanism based on a balance of multiple parameters, but as spectacular of an evolutionary trait as it may be, the process does not even compare to these creatures’ ability to leap off the surface of water.
“Water's surface needs to be pressed at the right speed for an adequate amount of time, up to a certain depth, in order to achieve jumping,” explains the study's co–senior author Kyu Jin Cho, Associate Professor in the Department of Mechanical and Aerospace Engineering and Director of the Biorobotics Laboratory at Seoul National University. “The water strider is capable of doing all these things flawlessly.”
Cho’s counterpart in the study, co-author Ho-Young Kim, who is Professor in SNU's Department of Mechanical and Aerospace Engineering and Director of SNU's Micro Fluid Mechanics Lab, observed that water strider’s legs have slightly curved tips that permit a rotational leg movement and prevents the leg from breaking the surface of water by maintaining contact for as long as possible during the jump motion.
Using this knowledge, the team constructed a simple robot using a “torque reversal catapult mechanism” similar to the flea’s ability to jump, which then allowed it to apply 16 times its own body weight in force against the weight of the water’s surface and not break through. The robot’s body was constructed using a self-assembling folded composite structure similar to the foldable structures in pop-up books.
“The resulting robotic insects can achieve the same momentum and height that could be generated during a rapid jump on firm ground – but instead can do so on water – by spreading out the jumping thrust over a longer amount of time and in sustaining prolonged contact with the water's surface,” said Wood.
The robot’s simple underling mechanism illustrates how the water strider itself can perform such acrobatic movements with very limited cognitive abilities.
Advertisement
Learn more about Electronic Products Magazine




