BY NAZZARENO (RENO) ROSSETTI, analog and power management professional; PHILIP MURPHY, product definer in the Automotive Business Unit; and SZUKANG HSIEN, executive business manager for automotive display power and gesture solutions
Maxim Integrated
www.maximintegrated.com
Automotive liquid crystal displays (LCDs) use multiple strings of high-brightness LEDs for backlight illumination. Multi-string LED drivers are an effective power supply solution, but their use presents a few design challenges related to electromagnetic interference (EMI), dimmability, safety, reliability, efficiency, and size.
The ambient light conditions in an automobile vary from intense sunlight to complete darkness, which means that the LED backlight must provide a wide dimming range to ensure eye comfort level throughout the day while avoiding visible changes in brightness (flicker). Low EMI in automotive electronics is critical to avoid interference with the multiple RF receivers in the vehicle. The LED drivers must be efficient to generate minimum heat, keeping the display from overheating and improving overall system reliability. With the size and resolution of each display increasing over time, the required electronics become more complex and must be limited in both weight and volume.
This article discusses the performance requirements of automotive backlights and the primary challenges encountered when designing for them. An LED driver solution will be introduced that overcomes these obstacles.

Fig. 1: Automotive LCD display.
Automotive LED backlight displays
Backlights provide the light source modulated by liquid crystals in LCDs for image representation. The biggest displays in the car are the instrument cluster display and the center stack or central information display. They can be up to 12 inches in diagonal size and are growing in use for each new car generation. Their backlighting is typically implemented with four or six interleaved strings of LED diodes, with seven to nine diodes per string, as shown in Fig. 2 . If one LED fails, it disables the whole string. With interleaved strings, if one string is out, the overall brightness is uniformly reduced across the screen.
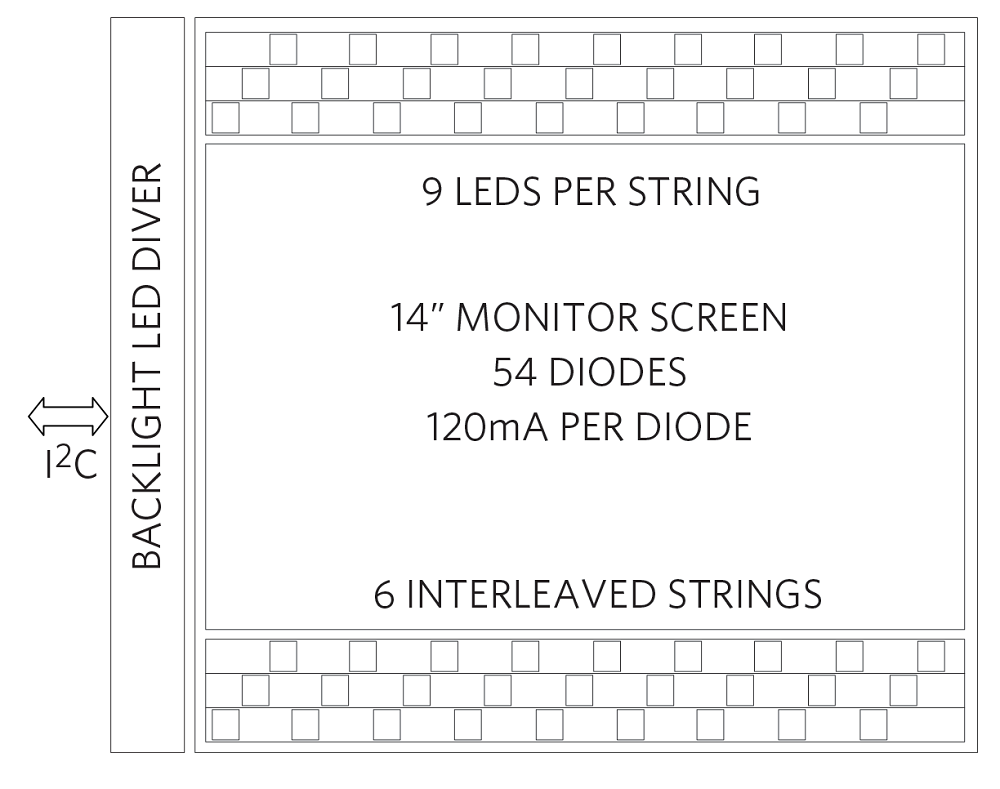
Fig. 2: Edge-lit interleaved LED backlighting.
LED driver
A multi-string LED driver (Fig. 3 ) is composed of a switching regulator and multiple current sinks. The switching regulator that powers the LEDs must meet specific requirements. Output voltage optimization is critical for minimizing power dissipation and keeping the circuit temperature at an acceptable level. It must operate over the entire voltage range provided by the battery and survive “load-dump” voltage transients. The current amplitude must be very accurate because it controls the LED color.
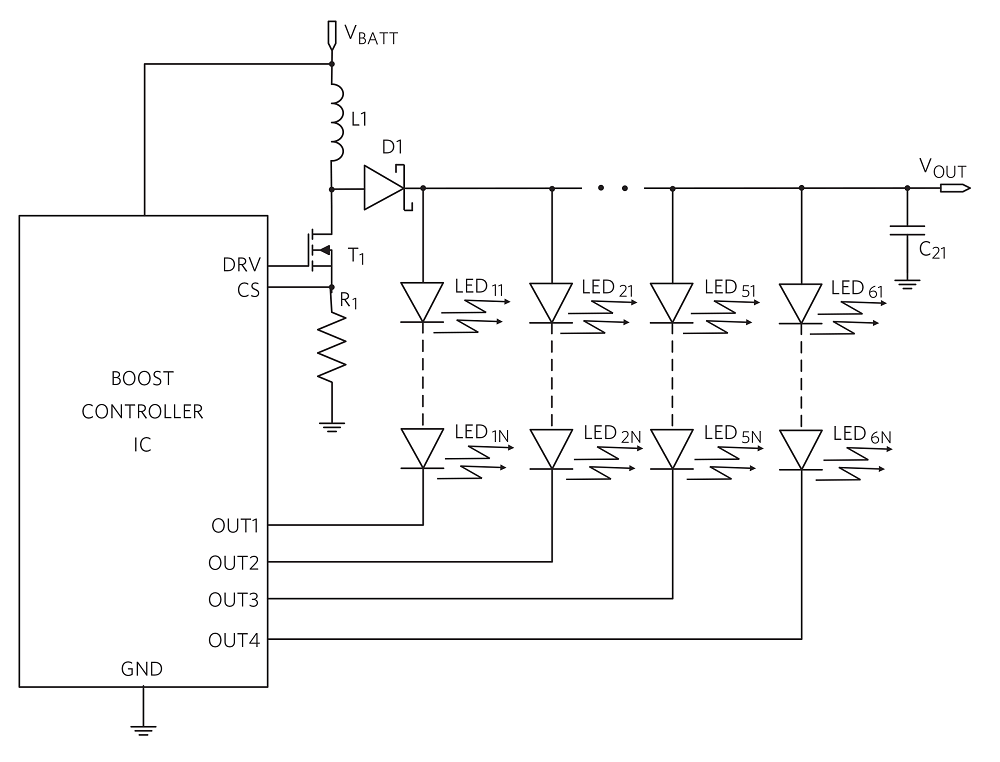
Fig. 3: Boost LED backlighting.
Ideally, an LED driver should have a flexible architecture that supports multiple configurations to implement different features. Fig. 3 shows the boost configuration, but we should also consider other configurations. A single-ended primary inductor converter (SEPIC) topology can be used if the number of diodes in the string is low. For example, two or three LEDs (7 V or 10.5 V) against a battery voltage can vary from less than 6 V (cold crank) up to 16 V. A single controller that supports different architectures has clear advantages of economies of scale and ease of reuse.
EMI reduction
Spread-spectrum (SS) modulation is often necessary to meet EMI standards. Fig. 4 (shows a device without SS) and Fig. 5 (shows a device with SS) illustrate the effect of spread spectrum. In Fig. 5 , SS reduces the harmonic peak energy by “spreading” the noise power over a wider band. In this example, the switching frequency is 400 kHz, which is below the AM band, and the electromagnetic (EM) noise reduction is above 10 dB.
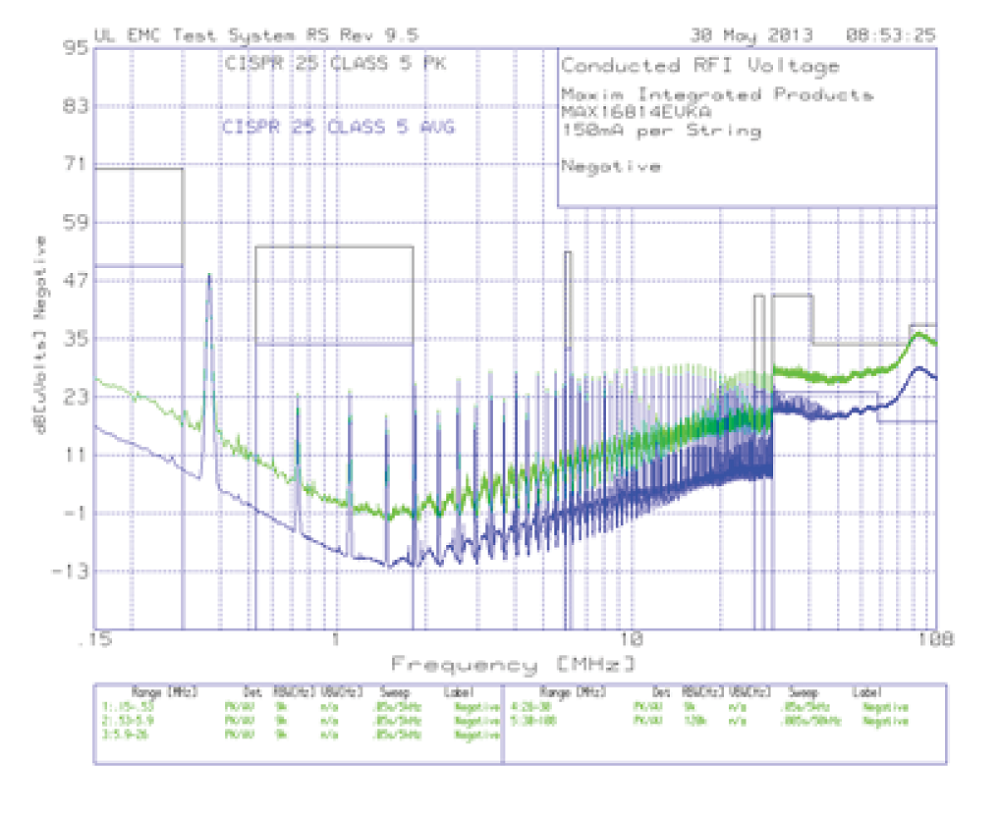
Fig. 4: Device without spread spectrum.
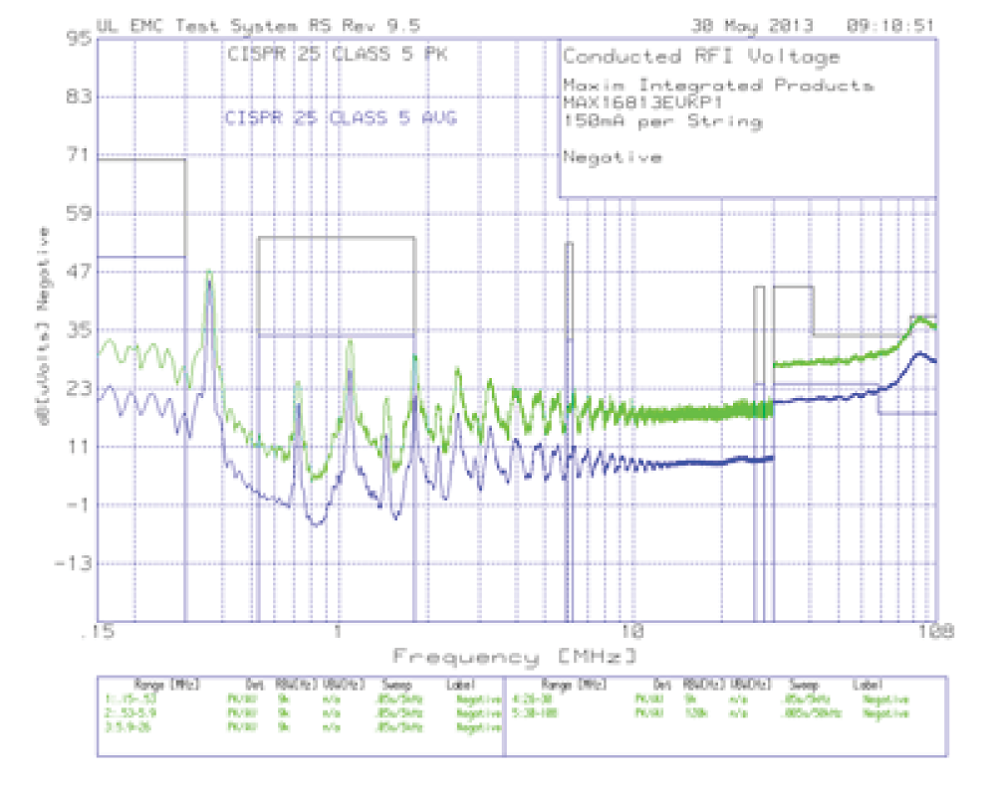
Fig. 5: Device with spread spectrum.
In choosing the regulator’s switching frequency, it is advantageous to choose a frequency either below or above the AM frequency band. This avoids the peak from the switching frequency falling in the AM band, where the permissible electromagnetic radiation is lower.
Phase shift
Phase shifting (Fig. 6 ) is a technique whereby the current-sink outputs are turned on and off in a staggered fashion, thus reducing the peak current drawn from the switching converter. The use of phase shifting reduces EMI at frequencies above 1 MHz. With phase shifting enabled and six strings, the LED strings are turned on/off and staggered by 60°. Accordingly, the output current (ILED1-6 ) edges do not overlap (except at exactly 16.6667%), resulting in lower EM energy peak released during each transition. A duty cycle TON /T = 16.6667 corresponds to a TON of 60°. In other words, if the width of TON is 1/6th of the period T, and the phase shift is 60°, you end up with aligned edges.

Fig. 6: Phase-shift timing diagram.
Fig. 7 shows the effect of phase shifting with an 80% dimming duty cycle and a 200-Hz dimming frequency (5-ms period). The black curve shows an 8-dB to 9-dB reduction of EM noise with phase shifting.
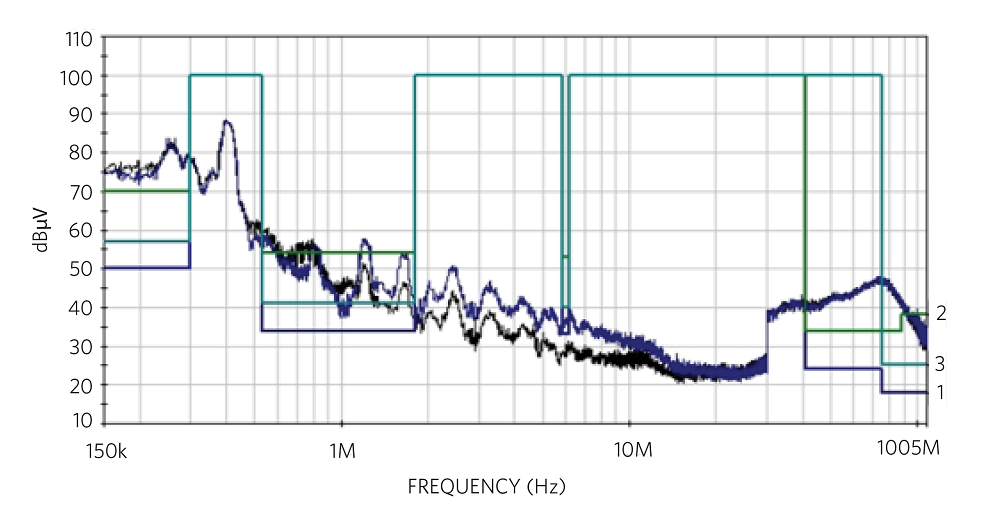
Fig. 7: Phase-shift EM spectrum.
The output frequency is entirely dependent on the (input) DIM frequency, which is usually in the range of 100 Hz to 1,000 Hz.
Hybrid dimming
Backlight dimming is accomplished by reducing the LED current or by chopping a constant LED current using pulse-width modulation (PWM). Time-slicing the LED current reduces the light’s brightness without affecting its color. The PWM dimming frequency must be above 100 Hz to be undetected as a flicker by the human eye. However, utilizing PWM dimming at high brightness (high current) introduces high EM noise due to frequent high-current transitions and switching losses. On the other hand, LED non-linearities limit the accuracy of the current delivery at low brightness.
In hybrid dimming mode (Fig. 8 ), the external LEDs are dimmed by first reducing their current amplitude. At the crossover level, the dimming transitions to PWM, where the LED current is chopped. This reduces EMI in the brightness range wherein only the current is changing.
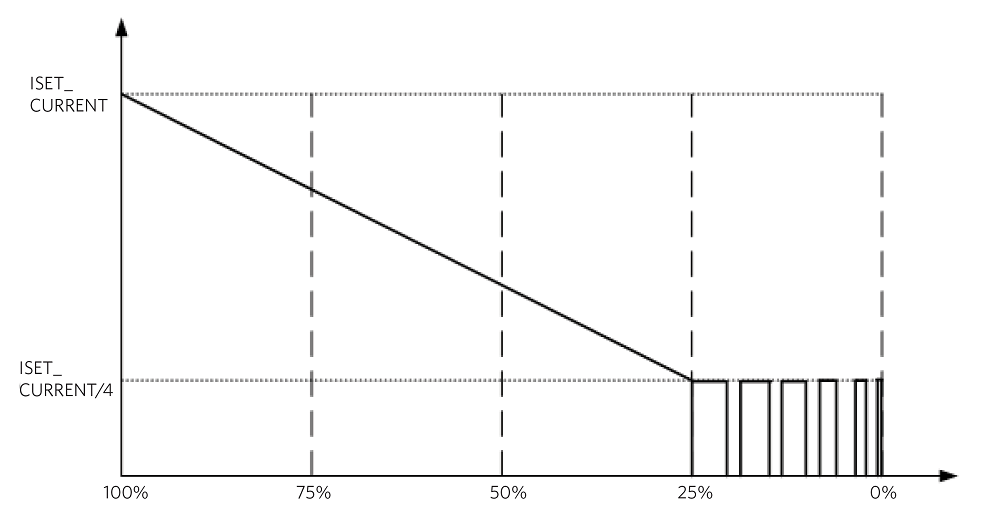
Fig. 8: Hybrid dimming.
LED backlight implementation
As an example, the MAX20446 is a six-channel backlight driver with boost controller for automotive displays. The integrated current outputs sink up to 130-mA LED current each. The device accepts a wide 4.5-V to 36-V input voltage range and withstands direct automotive load-dump events.
The internal current-mode switching DC/DC controller supports boost or SEPIC topologies and operates in the 400-kHz to 2.2-MHz frequency range. Integrated spread spectrum and phase-shifted dimming of the strings help reduce EMI.
An adaptive output-voltage control scheme minimizes power dissipation in the LED current-sink paths. Fig. 9 shows the device efficiency versus a competitive IC.
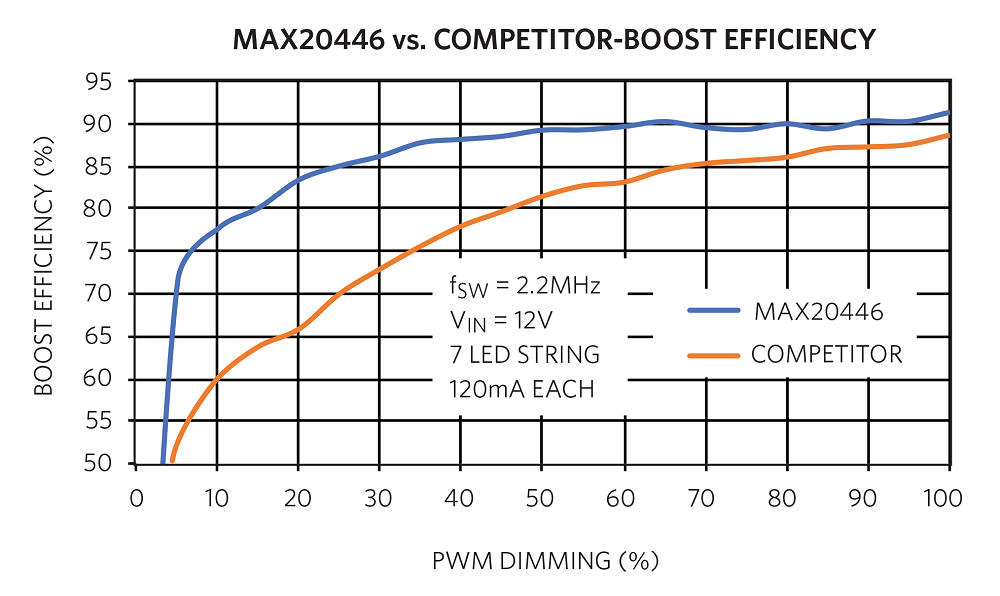
Fig. 9: Efficiency advantage.
The device features I2 C-controlled PWM dimming and hybrid dimming with the alternative of providing an external PWM signal at the DIM pin. In either case, the minimum pulse width is 500 ns. Accordingly, the maximum PWM dimming ratio at 200 Hz is 5 ms/500 ns = 10,000. There are four levels of current reduction dimming (50%, 25%, 12.5%, and 6.25%). With a 10,000 PWM dimming ratio and 6.25% (16x) analog, the maximum obtainable dimming ratio is a remarkable 160,000:1.
The small 24-pin TQFN package helps reduce the PCB size down to 1,094 mm2 , a 42% improvement over a competitive solution, which also lowers the cost.
Conclusion
LED backlighting presents several design challenges related to EMI, dimmability, reliability, efficiency, and size. The MAX20446 six-channel backlight LED driver provides spread spectrum and phase shifting for low EMI, optional frequency of operation outside the AM radio band, and unprecedented levels of hybrid dimming through the I2 C interface. High efficiency improves system reliability, while small size reduces PCB cost.
Advertisement
Learn more about Maxim Integrated




