MIT researchers have developed a pair of lightweight robot arms that can be easily strapped on to a person and used as an extra set of limbs.

Despite the slight drawback of causing the wearer to vaguely resemble a transformer, these Supernumerary Robotic Limbs, or SRLs, have many advantages that give their creators, Baldin Llorens-Bonilla and Professor Harry Asada, reason to be optimistic about their marketability.
The arms were originally designed to be used in an airport manufacturing setting. Boeing, recognizing that these SRLs would be helpful to a company such as themselves with an aging workforce, sponsored a lot of the research that went into them.
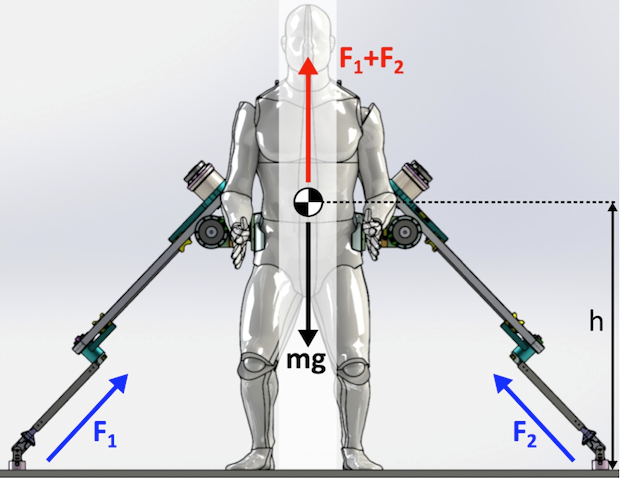
Two types of SRLs were developed: a pair that is attached to the upper back, and a pair that is attached to the lower back. The over-the-shoulder SRLs enable the workers to finish their work without excessive stooping, crouching, or heavy lifting, and they can also reach for things above the wearer that would otherwise have been too difficult to grab. The model that attaches to the lower back can be positioned like an extra set of legs; if angled correctly, they are able to support the full bodyweight of the user.
The benefits of the SRLs are not exclusive to companies like Boeing. They can also be a great help in everyday tasks such as holding the door while carrying a full load of groceries. They are also fairly lightweight, weighing only 10 pounds, so virtually anyone will be able to wear them.
Perhaps the most impressive feature the SRLs have to offer is the way they learn from the user what type of motions are required of them. Specifically, these machines use video sensing technology to watch what the user does with his/her physical arms, and when it senses a pattern, the SRL will know when and where they should use certain motions to support the user.
For example, if a worker wants to use the arms to hold a nail in place while hammering it in, the worker will have to wear the arms several times while they go through these motions with their real arms. The SRLs will learn what they should do when the worker begins to hammer in the nail, and will soon be holding the nail for the wearer whenever the wearer needs them to.
The ultimate goal is for the SRLs to begin acting like an extension of the wearer’s own body. The next step the developers are taking toward this goal is to program “behavioral modes” into the SRLs. If this is successful, the arms will already have preprogrammed motions that they can be commanded to go through, even before the user begins to teach them more user-specific ones.
By MaryElizabeth Koepele
Story via spectrum.ieee.org
Advertisement




