
By Mouser Electronics, www.mouser.com, (800) 346-6873
In the world of electronics, a robot isn’t really a robot unless it moves — and this is where precise motor control comes into play.
Robots designed to lift heavy loads may use high-torque AC induction motors that don’t require precise control over speed or positioning. However, robotic surgery requires extreme control over both. That degree of accuracy usually requires a brushless DC (BLDC) servo motor with closed loop position feedback for precise control—or a stepper motor with a large number of poles.
BLDC motors
BLDC motors for robotics need sophisticated electronic control circuitry and some way to continuously determine rotor position, which can be determined either by a Hall Effect sensor, as the SmartArc, from Honeywell Sensing & Control, or by measuring changes in the Back-EMF at each of the armature coils.
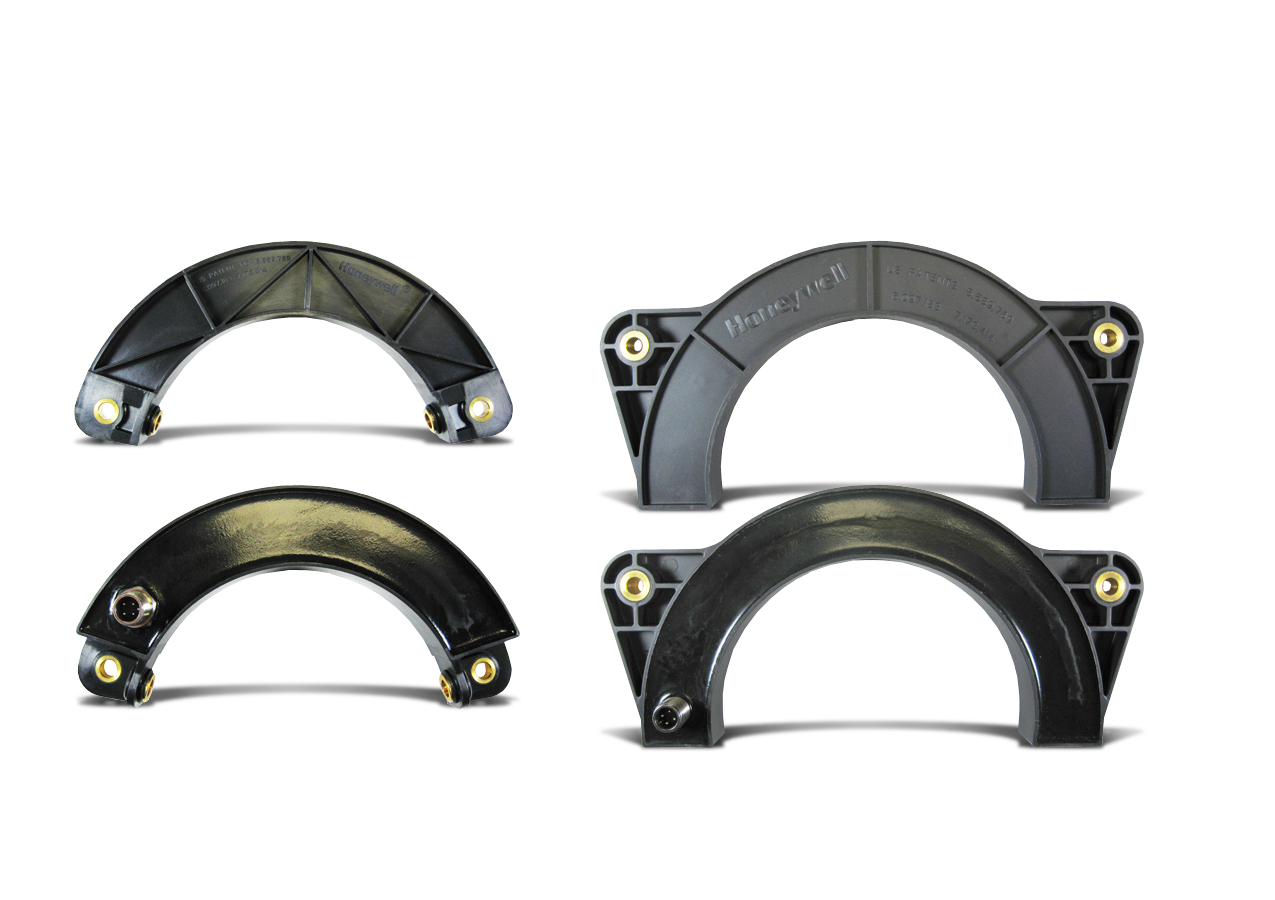
The SMART Position Sensor is one of the most durable, adaptable, and lightweight linear position sensors available.
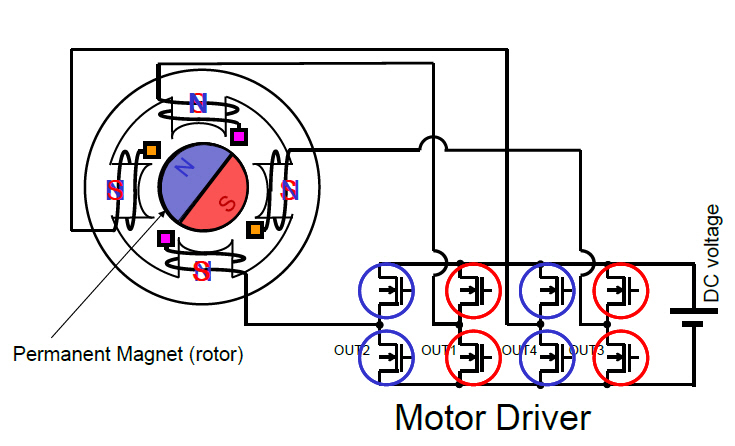
Whereas speed of brushed DC motors is determined by the applied voltage, the speed of BLDC motors is determined by switching frequency. PWM pulses drive the motors, as shown in Figure 1.

Instead of a mechanical commutator changing the magnetic polarity of the rotor coils, BLDC motors have transistors, usually MOSFETs such as Fairchild Semiconductor, ON Semiconductor, International Rectifier, Vishay, and Infineon, that continuously work to change the phase of the stator coils to rotate the motor.
Stepper motors
Stepper motors advance the rotor in finite increments; the shaft stays fixed until moved again. They are synchronous DC motors without brushes or contacts; but with magnetic fields electronically switched to rotate the armature magnet around, converting digital pulses into shaft rotation.
A stepper is a synchronous DC motor that divides a full rotation into a discrete number of steps; the number of steps is equal to the number of electromagnets arranged around a central core. By controlling the current to these magnets the motor can be turned by a precise angle.
Steppers are typically driven by H-bridges under PWM control (Figure 2). H-bridge rotation angle is proportional to the number of pulses, and rotational speed is proportional to the frequency of the pulses. One example of a good H-bridge driver for robotics is the Texas Instruments DRV8313, with three individually controllable drivers.
The Three Half-H-Bridge Driver IC drives 3-phase brushless DC motors.
Power to the robots
When you start considering a robotics project, check out Mouser’s library of tutorials, design articles, and white papers addressing applications and technologies. As you progress to the design stage look to Mouser’s wide selection of motors, sensors, motor driver PMICs, DSPs/MCUs, and even complete robotics kits. Whichever type of robot you are considering, Mouser has components and resources to see your project through to a successful conclusion.
Advertisement
Learn more about Mouser Electronics




