The increasing prevalence of unmanned aerial vehicles (UAVs) in the U.S. military and the subsequent evolution of flight communication technologies have enabled the Air Force to explore the near possibility of building gangs of autonomous UAVs that use craft-to-craft communication. The future fleet would fly under the guidance of one drone operator and replace traditional fighter jets.
The concept of the fleet is such that each drone would function as an autonomous unit working collaboratively to complete a sole mission, allowing one pilot to oversee up to six drones at once. The autonomous actions of the drones originate from the communication and interaction with one another. For example, the managing pilot can set the mission plan of all six drones to fly from Point A to Point B in a certain flight pattern. If the designated paths of Drones 5 and 6 become obstructed — perhaps if a bird flies into the path — the drones that are unaffected can continue on their flight paths. Drones 5 and 6 can maneuver around the obstacle and rejoin the rest of the fleet, all without any direction from the pilot. The pilot can oversee the fleet’s actions and update or change the mission plan.
For the Pentagon, drones are cheaper to buy and operate than fighter jets. An armed MQ-9 Reaper drone runs about $14 million, compared to $180 million or more for an F-35 Joint Strike Fighter — not including the cost of training pilots. It currently costs the taxpayer about $6 million a year to train one fighter pilot in today’s Air Force. Consequently, the Air Force is revisiting their policy of requiring drone pilots to have cockpit experience.
But even with diminishing requirements, the Pentagon does not have enough drone pilots to meet its needs, reflecting the difficult and thankless nature of the position. The problem is certain to persist as the military increases its reliance on unmanned systems, especially in areas where it has no interest in putting boots on the ground, like Pakistan and Iraq. The military is exploring the possibility of increasing the level of autonomy in UAVs to allow one pilot to manage several drones at once.
The idea of craft-to-craft communication is nothing new, as displayed by the University of Pennsylvania’s General Robotics, Automation, Sensing, and Perception (GRASP) lab’s demonstration of the swarm capabilities of Nano Quadrotors back in 2012. GRASP robotics researchers and developers from KMel Robotics were able to program teams of up to 20 agile-flight-capable quadrotors to fly in various complex formations with spatial awareness, exhibiting complex autonomous swarm behavior.
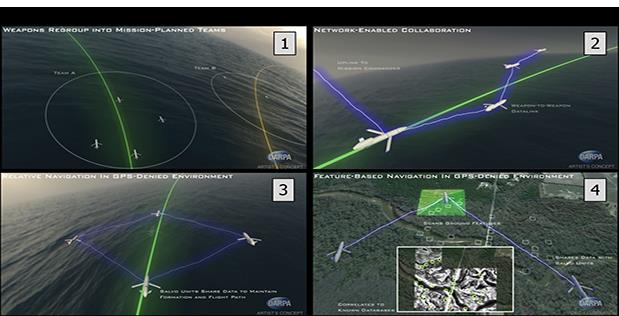
In 2015, the Defense Advanced Projects Research Agency (DARPA ) began the “Collaborative Operations in Denied Environment,” or CODE, project to develop ideas for building packs of flying machines that communicate more with one another than with their operator, thereby allowing a single operator to preside over a unit of six or more drones. The program seeks to fully realize a collaborative autonomy in which military UAVs could perform sophisticated tasks, both individually and in teams, under the supervision of a single human mission commander by sharing data, negotiating assignments, and synchronizing actions and communications among team members. CODE’s modular open software architecture enables multiple CODE-equipped unmanned aircraft to navigate to their destinations and track, identify, and engage targets under established rules of engagement.
In a recent statement, DARPA’s program manager, Jean-Charles Ledé, discussed the potential value and tactical edge of collaborative autonomy: “Between the two teams, we have selected about 20 autonomous behaviors that would greatly increase the mission capabilities of our legacy [UAVs] and enable them to perform complex missions in denied or contested environments in which communications, navigation, and other critical elements of the targeting chain are compromised. We have also made excellent progress in the human-system interface and open-architecture framework.”
All airborne software is system-dependent and requires the attention of leading industry programmers. Autonomous algorithms are being developed in open architectures, allowing the software design to be added, upgraded, and swapped easily. The right development environment plays a key role in simplifying the design of autonomous drone operation software.
One such example, the MPLAB Xpress Cloud-based IDE, offers a simple, fast, and easy-to-use development environment for consumers, offering the industry’s most comprehensive feature set — including MPLAB Code Configurator for peripheral setup and code generation, Microchip-validated code examples, and 10 GB of secure online storage with any myMicrochip account.
Content Provided by AspenCore and (client).
Sources: Defense One, Fox, Gizmag, PM
Advertisement
Learn more about Electronic Products Digital




