Falling into the mental pitfall of assumption is especially easy when the subject concerns robots. One often assumes that because robots are portrayed in popular culture as an electro-mechanical machine, that anything short of being digital or programmable cannot be considered a “robot.” In fact, the word robot actually appear way before digital electronics were even a thing, originating from the Czech word “robota” which means “forced labor.” By that assumptions, any machine autonomously capable of performing a complex series of tasks may be considered a robot. Here’s a list of some of top robots and machines from the annals of history:
1. Al-Jazari’s robot band (1206)
Badi'al-Zaman Abū al-'Izz ibn Ismā'īl ibn al-Razāz al-Jazarī — or al-Jazari for short — was an inventor, scholar, mathematician, artist, and engineer, that thrived during the Islamic Golden Age. Clearly a genius ahead of his time, al-Jazari used hydraulic switching alternate the flow of water from one large tank to another at regular intervals in order to automate a musical construction and fountain that he had made to float on a lake and entertain guests.

2. Leonardo da Vinci’s robot (1495)
References turned up in the 1950’s detailing sketched plans for a mechanical robot knight designed by Leonardo da Vinci at some point in the 1495. Now officially known as “Leonardo’s robot,” the automaton was supposed to be able to sit up, wave its arms, and move its head and jaw. The image below shows a replica built in 2007.

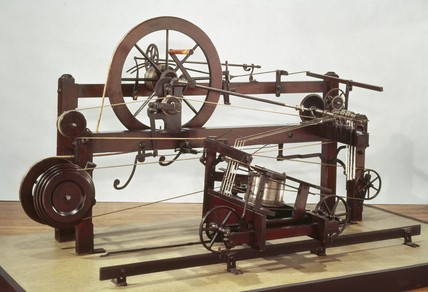
3.) Spinning Mule (1779)
The Spinning Mule was the first automated, power-driven spinning machine designed to help accelerate production speed in the weaving industry by weaving up to 100 threads at once. Designed by Samuel Crompton, the machine was constructed in 1779 as a successor to the 1764’s Spinning Jenny. It did not spark the 19th -century Luddite movement in which English textile workers rebelled against the automation of weaving practices, but served as a precursor to the creation of the power looms, spinning frames, and stocking frames that eventually would.
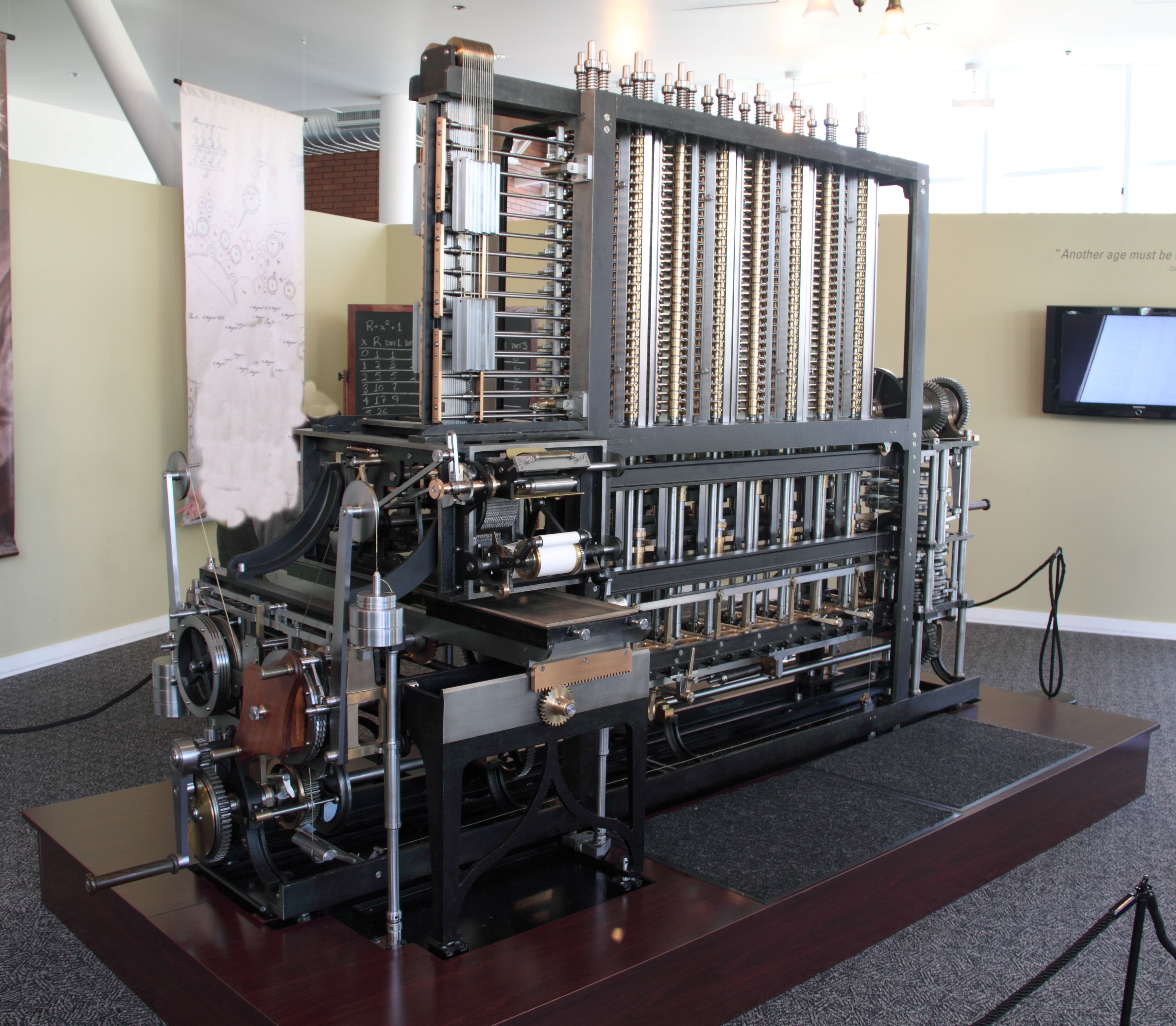
4.) Difference Engine (1842)
Resembling a mechanism straight out of a steampunk novel, the difference engine is amongst the first programmable machines, a massive mechanical calculator designed to compute polynomial functions. Picture believe is a pristine scale-model built by the London Science Museum in 1991 based on the original plans of Charles Babbage, its creator. Although Babbage took 19 years to construct the machine by the time it was finished in 1842, the idea was conceived as far as 1786 by an engineer in the Hessian army named J.H. Muller.
The difference engine contained multiple columns numbered 1 to N, with the ability to store one decimal number in each column a produce a new value when adding the value of a column N+1 to column N before displaying the value of the current iteration in column 1.
5. Gakutensoku (1929)
Renowned for its deep-rooted interest in robotics, Japan built its first robot in Osaka, 1929, an odd machine called the Gakutensoku that could move its hand, face, and head using an air-pressure system. While the machine disappeared during a tour of Germany in the 1930s, a replica was rebuild in 2008 for the Osaka Science museum.

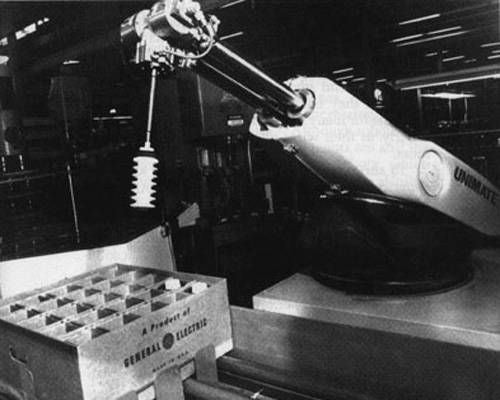
6.) Unimate (1961)
Created in the 1950s and patented in 1961, Unimate is the forefather of all assembly line robots. Moreover, when it debuted at the General Motors assembly line in Inland Fisher Guide Plant in New Jersey, it was deemed the first industrial robot.
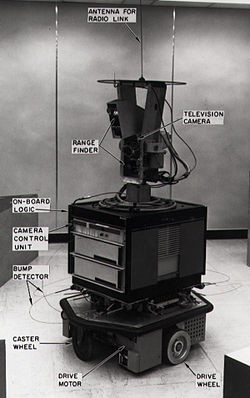
7.) Shakey (1972)
Funded by DARPA and developed by the Artificial Intelligence Laboratory of SRI International, Shakey the Robot was the first robot to mesh logical reasoning and physical actions. The robot was conceived as a “general-purpose mobile robot” that was able to evaluate commands received through a keyboard and break them down into a series of steps. Its development had far reaching implications into field of robotics, including the development of the A* search algorithm, used in calculating the movement and path between two points; the Hough transform, the preliminary computer vision and image processing technique; and the visibility graph method for determining the Euclidean shortest paths between obstacles in the plane.
Source: MNN.com
Advertisement
Learn more about Electronic Products Magazine




