This application note describes the Quadrature Encoder peripheral on the Z32F128 device and provides two examples of peripheral usage. The quadrature encoder decodes the signals received from an encoder and provides the information without CPU intervention.
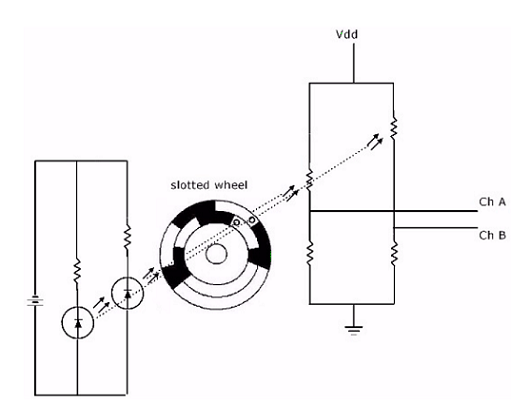
The Rotary Encoder example demonstrates the use of the encoder with a rotary dial (not a potentiometer), which is generally used with audio equipment. Rotary dials typically only use Phase A and Phase B lines with no index line.
The Motor Encoder example demonstrates the use of the encoder with a motor to determine speed and direction. These encoders use Phase A, Phase B, and Phase Z (index) lines to provide the information. The positioning is automatically included in the peripheral, although not used in the example.
Advertisement

Learn more about Zilog




