Fast running robots are fun, fueling the imagination with all manner of military or search-and-rescue scenarios. This may be the reason why so many different groups from Boston Dynamics to MIT have had a crack at developing their own design; the latest contender is called Raptor and hails from the Korea Advanced Institute of Science and Technology (KAIST). Raptor, incidentally named after the velociraptor dinosaur from which it is inspired, uses two nimble legs and a mechanism that mimics a tail for stability to reach a maximum speed of 48 km/h (on a treadmill) while simultaneously leaping over obstacles in its path.

To put this measurement into perspective, the fastest Olympic sprinter, Usain Bolt, tops an approximate speed of 43.92 km/h whereas, Boston Dynamics’ Cheetah clocked in at 47 km/h on a treadmill two years prior. Raptor was developed by a joint effort between PhD Student at KAIST’s Mechatronics, Systems, and Control Laboratory, Jongwon Park, and fellow colleagues Jinyi Lee, Jinwoo Lee, Kyung-Soo Kim, and Professor Soohyun Kim.
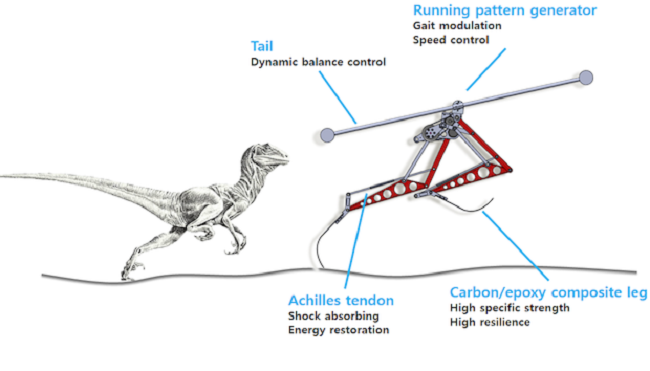
Cheetah and Raptor are structurally very different even if their speed is closely matched. Cheetah is a quadruped powered by hydraulic actuators. By contrast, Raptor generates forward motion from motors embedded in each leg consisting of a nine-bar linkage. Built in Achilles tendons function as springs, absorbing and restoring energy exerted on forward motion. Gait and speed is set by a computer program known as a running generator.
Raptor is also far more compact, weighting only three kilograms thanks to the light weight composite material making up its legs. The robot is outfitted with a tail that moves rapidly from side to side to maintain torso-stability when running high speeds or leaping over objects. Although its bears no resemblance to that of an actual velociraptor, it serves to replicate the same mechanics.
Check out Raptor running at its full speed in the video below. Note how the machine is undisrupted by obstacles, going as far as to jump over them.
Integrating a tail for stability is a not an idea exclusive to KAIST, UC Berkley’s wheeled robot also features a tail based on a velociraptor’s. Similarly, MIT’s cheetah-inspired quadruped uses a mechanical tail. What distinguishes Raptor for these robots is that it managed to produce advanced results, comparable to the more resourceful Boston Dynamics, with a relatively uncomplicated design.
Park and his team are currently working to optimize Raptor for extra stability at higher speeds. I hope the next incarnation will sheds the treadmill altogether, perhaps if the South Korean military picks up the tab; at least they’re not claiming the robot is developed for “search and rescue.”
Via Ieee spectrum
Advertisement
Learn more about Electronic Products Magazine




