By JIM McNAMARA
Senior Applications Engineer
BEI Kimco
www.beikimco.com
Compared to the vast majority of systems that require motion control, medical devices typically tend to be smaller and lighter, simply because they are often portable/mobile systems that are hand-carried or lifted. For instance, doctors use small handheld devices, similar to dental tools, for dermal abrasion. So where possible, the internal components needed for a medical device must be chosen to provide the smallest overall device footprint.
Voice coil actuator (VCA) technology is well suited for medical design; yet, in spite of VCA’s desirable performance characteristics, many are unfamiliar with this motion control solution and, hence, it is often overlooked. Originally used in audio speakers as a means of rapidly moving a diaphragm to create air pressure waves, or sound, VCAs have since been used in many other applications to supply precision linear or rotary motion while also providing other desirable attributes, such as low hysteresis, no cogging or detent, high acceleration and force, and a long life cycle.
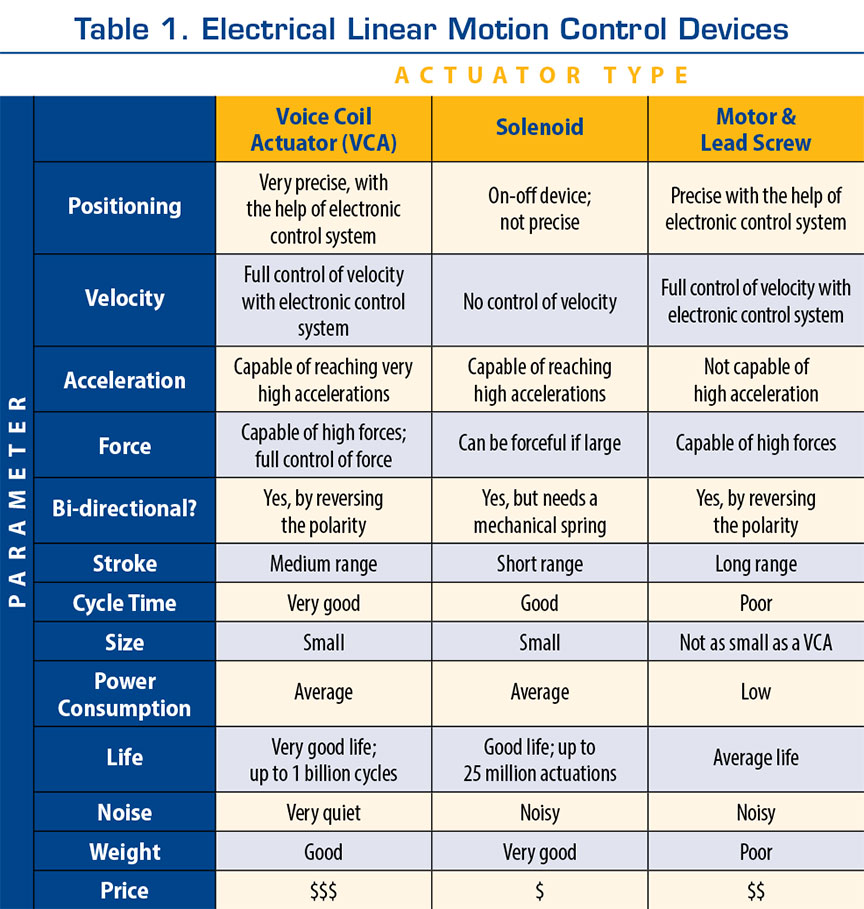
When designing small, often-portable/mobile medical devices that require linear or rotary motion control, there are essentially three choices: VCAs, solenoids, and motors with lead screws. Table 1 compares the key attributes that an engineer needs to consider when selecting an actuator for portable/mobile medical applications.
Voice coil actuators are very controllable, repeatable, and predictable, with low hysteresis. A VCA can have hysteresis as low as 10 mN, whereas other devices like stepper motor actuators have hysteresis of 200 mN or more. Compared to actuators with stepper motors, which use steps as a measure of hysteresis, VCAs are single-phase, direct-drive devices and, because of that, do not have this problem. This allows VCAs to be used with control algorithms that are open or closed loop. Compared to solenoids, VCAs are controllable in both directions, instead of just energized or not. In the following sections, we’ll examine actuator attributes primarily with respect to VCAs.
Size, weight, and heat
Today, most actuators used for portable/mobile medical devices are only about 1.5 in. in diameter or smaller and weigh a pound or less. In many cases, VCAs can be made smaller than other motion control devices in order to reduce weight and fit into compact assemblies. However, smaller actuator sizes typically decrease heat dissipation, leading to possible overheating. That’s why, when considering the size-to-heat trade-off, it is important to understand the thermal characteristics of the actuator and the system into which it is being integrated. The bottom-line trade-off is simply that smaller means hotter while larger means cooler.
Internal thermal temperatures are an important factor to consider, especially if a VCA is going to be used directly on patients. Location of the actuator coil is the key difference in how much heat is generated. A moving-magnet-type (versus moving-coil) VCA is ideal for heat dissipation by virtue of its stationary coil design (Fig. 1 ).
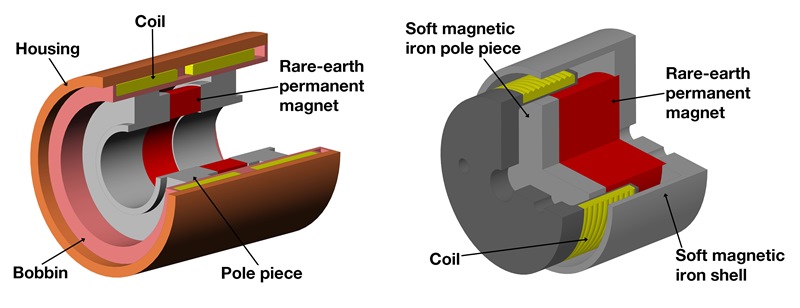
Fig. 1: The moving-magnet voice coil actuator (left) keeps the coil fixed so that the heat generated by the coil assembly can be easily managed compared to the moving-coil-type actuator (right).
The moving-magnet actuator allows the magnet to move and keeps the coil fixed so that the heat generated by the coil assembly can be more readily managed; since the coil is on the outside of the moving-magnet actuator, the heat generated is also on the outside. Thus, this actuator provides a good thermal path and much better heat dissipation. The other tradeoff, however, is increased moving mass and lower acceleration.
Safety
In many medical applications, magnetic latches and springs are used to allow the VCA to stay in a “home” position when not energized. In other words, the actuator function is maintained even without the heat that is generated when power is on. This safety feature can prevent potential overheating that could cause it to burn up, be too hot to hold, or affect something else near the actuator that is sensitive to temperature.
Another important safety feature can be illustrated through the example of ventilator valves. Here, if the power is shut off, the valve can stay open and allow the patient to continue to breathe on his/her own.
Irrespective of safety issues, magnetic latches and springs can also reduce the overall size of the medical device by eliminating the need for external springs or other types of control/safety features.
Force/torque and stroke
However, to take advantage of that benefit, it is necessary to first ensure that the VCA force capabilities can overcome the force of the latch or spring being used (see Fig. 2 ). The control scheme must be designed so that it does not inadvertently overdrive the VCA because the VCA will only do what it is told to do. This means that the VCA must be configured properly to protect sensitive hardware to which it may be attached from damage.

Fig. 2: When considering the use of magnetic latches and springs on an actuator, it is important to make sure that the actuator is capable of overcoming the force of the latch or spring being used. The graphs above show what a given actuator is capable of by itself compared to its performance when it has a built-in magnetic latch (upper graph) or magnetic spring (lower graph).
VCAs are known for having high forces/torques relative to their size. The force/torque generated by voice coils can be used for position control or to create acceleration. This is the starting point for determining what size actuator is needed.
Stroke is how far the VCA needs to move for a given application and is another key factor in determining the VCA size. In medical applications, stroke might be as small as 0.25 to 0.5 in., compared to other industrial applications that are more in stroke ranges of 0.5 to 2 in. VCAs have no minimum stroke limitation; however, their stroke capabilities can be restricted by the resolution of built-in or external position sensors.
Speed and position accuracy
VCAs can achieve very high speeds and this ability is where they outshine other motion control devices. High speed also lends itself to achieving high acceleration and oscillation frequencies. Typical peak speed for a VCA is 3.3 m/s.
It’s important for the medical designer to know what is needed from the actuator in terms of position accuracy, as well as speed and acceleration, to choose the right actuator or have it custom-built. The actuator is an analog device and, as such, it has infinite capabilities for precision. Its precision is limited only by the sensor (or controller) which commands it, whether it is separate or actually built into the actuator itself.
Biocompatibility
Some medical applications require that material in the actuator be biocompatible, in case there is contact with the patient. In these cases, manufacturers must disclose all actuator materials to the customer in order to get FDA approval.
VCAs can be specially built to meet these requirements. While standard VCAs are often incompatible with many chemicals, reactive fluids, or low out-gassing requirements, custom engineering can adapt VCAs for various IP ratings and/or construction with low outgassing materials.
Housed and un-housed actuators
Providing actuator housing is not unique, but unhoused actuators lend themselves to being integrated into an assembly. Unhoused actuators are also less expensive and can end up being smaller, but they do require the design engineer to build the mechanical structure to maintain the field and coil concentricity needed. For the design engineer, housed actuators are more convenient and turn-key.
As unhoused devices, VCAs have no friction or wear. This means that an engineer designing a product with a VCA can select or design a field and coil support system to meet his own friction and wear requirements. More often than not, engineers design their own support systems because housed VCAs are not available for their unique application.
Power
It is important to make sure that there is enough power to meet the performance requirements. Specifications for VCAs usually show peak and continuous ratings for force/torque, current, and power and are commonly available for dc voltages from 5 to 300 V. In medical uses, a fairly typical VCA would be 232 Wpeak with continuous power of around 50 W (typically rated between 12 and 48 V).
Capabilities and limitations
VCAs can be designed to meet size and performance requirements for medical applications such as hand pieces, ventilators, and other delicate medical instruments. (See sidebar, “Examples of medical VCAs.” ) Force and stroke requirements are determining factors of whether a VCA is suitable for the given medical application. In applications where a long life cycle is needed, as with most medical requirements, the VCA is chosen because other devices have mechanical gears that don’t last. Price can also be a factor, as VCAs are typically more expensive than other solutions. However, their long life, speed, and the other advantages often outweigh price considerations.
Advertisement
Learn more about BEI Kimco Magnetics




