With the rise in robotics, industrial automation, and the Internet of Things, the need for sophisticated motor control has dramatically increased. But sensorless operation and sophisticated algorithms such as field-oriented control have typically required complex programming and powerful computation, keeping them out of reach for many developers. Newer control motor driver chips are entering the market, however, bringing smooth, precise, and power-efficient motion control within the reach of the non-expert.
At its most basic, an electric motor is a simple concept. It consists of permanent magnets and electric field coils arranged around a drive shaft that forms a rotation axis. When the field coils are energized, they attract the permanent magnets in a way that causes the drive shaft to rotate to bring the two in alignment. By properly phasing the way that the field coils get energized, this movement can be made continuous. When the alignment is almost complete, simply switch the energy to the next coil in sequence (a process called commutation) to reposition the point of alignment. Like leading a donkey with a carrot held just out of reach, the result is that the motor keeps turning.
The first practical electric motors appeared back in 1834 and have proliferated in size and type since then. Today, we have large electric motors powering trucks and cars, tiny motors powering palm-sized quad-copters, and everything in between. Motor types now include AC synchronous and induction types and DC motors with both mechanical (brushed) and electronic (brushless) commutation. There are also many variations within these broad categories.
For many developers, the operation of a motor also seems simple: You apply power, and it spins. But there is a lot more going on than that, and precise control of the motor’s operation is increasingly important in robotics and many other systems. Furthermore, different types of motors require different types of control, adding even more complexity.
Two of the most popular motor types in motion control are the stepper motor and the brushless DC (BLDC) motor. Stepper motors, as their name suggests, are a variant of AC motors designed to rotate in small, discrete arcs or steps. They can pause between steps to provide a set-and-hold-position kind of motion. A BLDC motor, on the other hand, is designed for continuous rotation. Both are commonly used when precision motion control is desired, the exact choice depending on the application.

A rise in robotics is bringing with it increased demand for precision motion control that newer ICs are making less difficult. (Image source: Rethink Robotics)
To provide controlled motion, however, you need to know where the motor is in its rotation arc. This knowledge is not only essential for determining position, it is helpful in controlling the motor’s speed. There are rotary encoder sensors that one can clamp onto the drive shaft to provide this information, or there are sensorless methods that use the back EMF from the field coils.
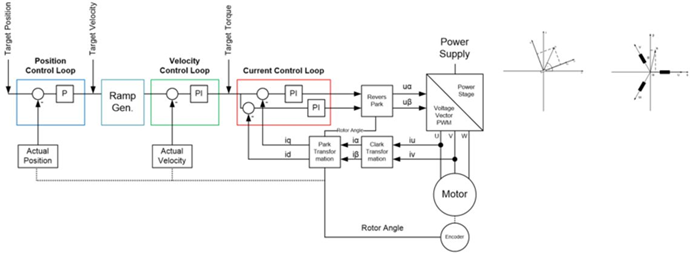
In most cases, you also need to control the speed of motion: velocity, acceleration, and even “jerk,” the time derivative of acceleration. You implement this control by modulating the current driving the field coils, and that current varies with rotational position, motor mass, load on the drive shaft, and the motor’s magnetic dynamics. So that seemingly simple operation quickly proves to be a complex problem in control loop theory for motors. A number of increasingly complex control loop approaches have evolved, often named for the basic shape of their drive waveforms, including sinusoidal, trapezoidal, and field-oriented control, also known as vector control. Optimizing motion control for a given application, then, can require considerable knowledge and expertise.
Advanced motor control algorithms can seem daunting, but vendors are ramping up developer support with libraries, tools, and even pre-programmed devices.
Fortunately, you no longer need to be a control loop and motor expert to obtain a reasonable degree of precision movement. Companies have started creating motor controllers, sometimes called motion controllers or motion processors, that have these algorithms pre-programmed to varying degrees. In some cases, they are parameterized so that you need only input some data about your motor choices. From there, you simply send the device your motion commands, and it takes care of the rest. These intelligent motor control devices take a great deal of the complexity out of the design.
Stepper motors have particularly benefited from the advances in motor control chips. Moving machinery in steps can create mechanical noise, but with control of acceleration and jerk, steppers can provide fast and smooth motion with minimal mechanical noise. Asthis video shows, intelligent stepper control using advanced control algorithms also smooths out motion.
This move to pre-configured motor control is only just getting started, however, so motion control chips come in a range of functional levels. Industry staples like Infineon , IDT, STMicroelectronics , Toshiba , and Texas Instruments offer motor controllers with library software and tool support for implementing advanced algorithms such as FOC and sensorless operation. Other companies, like Active-Semi, Broadcom, Performance Motion Devices (PMC), and Trinamic, are competing by offering fully pre-programmed devices that handle most of the complexity automatically.
Because the industry is in flux, developers working with motors and motion control should seek out news on the latest introductions before making their choices. Evaluate devices by keeping in mind the type of motor you will be controlling, speed and load constraints, any requirement for sensorless operation, and what kinds of control algorithms you want to use. Chips typically specialize in one or more of these areas. If you can find one that meets all of your parameters and is available with substantial libraries or even pre-programmed, you will be saving yourself a great deal of effort that you can spend on perfecting your application instead of tweaking the motion control.
Advertisement
Learn more about Electronic Products Magazine




